 PDF version of this entire document
PDF version of this entire document
The ubiquity and ever-decreasing cost of mobile/portable devices has
gradually increased interest in their usage inside cars. In order
to guide cars' preferred routes on the road, programmers are able
to harness and truly exploit computer vision methods. It is not clear,
however, which ones work best and are also practical to run on mobile
hardware with decreased performance capabilities in mind (relative
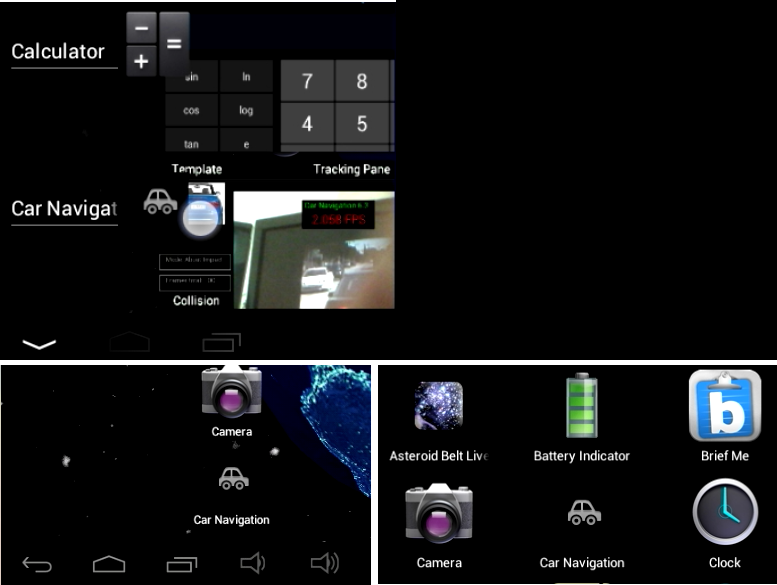
to desktops). This project explores the question by implementing a
system which alerts the driver about obstacles on the road, primarily
other vehicles1. These ideas and accompanying code are extensible in the sense that
detecting more types of nearby objects is a task largely hinged on
additional training of multiple classifiers, necessitating more crude
manual work. Figure ![[*]](/IMG/latex/crossref.png) shows the program
running under a physical Android device.
shows the program
running under a physical Android device.
|
In this document I outline implementation aspects of this project. A comparison of multiple methods should be possible, but it remains beyond the scope of this work due to time constraints. I will begin by presenting the development framework, the scientific methods in brief, and the hardware used in subsequent experiments.


