PDF version of this entire document
PDF version of this entire document
The core supposition or hypothesis here is that by better selecting boundaries of the surfaces - using geodesic means - the innately geodesic method which is GMDS will perform a lot better and hardly suffer from insufficient information, commonly caused due to Euclidean cropping criteria (as attempted beforehand). For consistency, the experiments that follow will adhere to this 'half face' approach as a given. Realistically, taking a hybrid of features and applying LDA or integrating over them might work better. This is also well supposed by the geodesic masking function. Rather than scoring based on just two surfaces, it is possible to compare subsets of these, with or without fiducial points as a key component to latch the sub-surfaces onto (e.g. eye corners).
Early exploration of our problem revolves around the effect of varying the point around which surfaces get carved. It can be shown that, even for the same person (i.e. same face), the effect of moving that point is as severe as comparing two different faces, so this point is very prone to change the results (a sensitivity-related issue). An interesting experiment might be to distance oneself from this point by controlled and gradually-increasing amounts and then rerun experiments of recognition, seeing how accuracy of this point's allocation affects performance and how much degradation is caused by missing it even very slightly. The location of the features with sub-pixel accuracy cannot be guaranteed, so this might be important to do as a form of sanity check.
Then we have a case of Euclidean plus geodesic cutoff depending on
the side, with a fixed point below the eye. The stress/mismatch/distance
too is being shown at each point. It helps show the difference, but
doing this more properly with geodesic distances all around is probably
best. In terms of results, it seems promising, but more elaborate
experiments are needed before arriving at any such a conclusion. Using
just the nose area for matching has proven to be a poor approach based
on some rudimentary tests, but maybe this can be improved shall the
need for piece-wise feature-based comparison arise. The geodesic cutoff
examples are shown in figures ![[*]](/IMG/latex/crossref.png) , ,
, and .
, ,
, and .
|

|
|
We shall use the following feature point selection and geodesic circle
(support) strategy. If without loss of generality we select the nose
and eyes as the features and our geodesic distance ambiguity of the
feature selection is ![]() , then for the gallery (target)
surface, we define the support as the union of
, then for the gallery (target)
surface, we define the support as the union of ![]() geodesic
circles about each feature point (
geodesic
circles about each feature point (![]() and
and ![]() could be
different for each feature). The probe surface should then be defined
as the union of radius r-geodesic circles about the features.
could be
different for each feature). The probe surface should then be defined
as the union of radius r-geodesic circles about the features.
This way we try to embed a smaller surface into a larger one, where the larger one is large by the amount of ambiguity of the selected feature (we would like to assume it would be small, but not too small, one would say, 5mm).
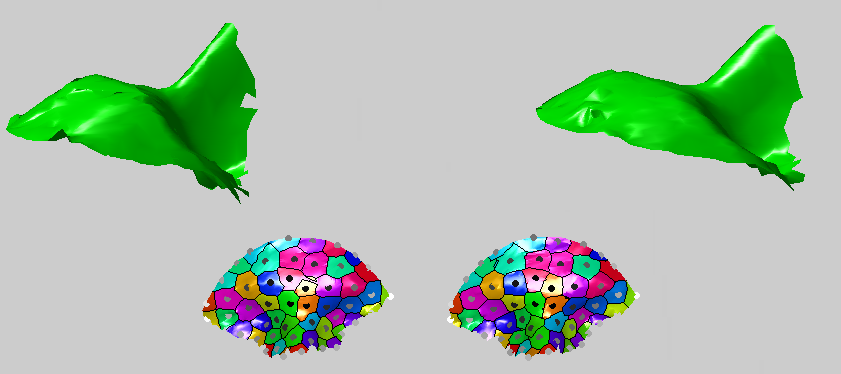
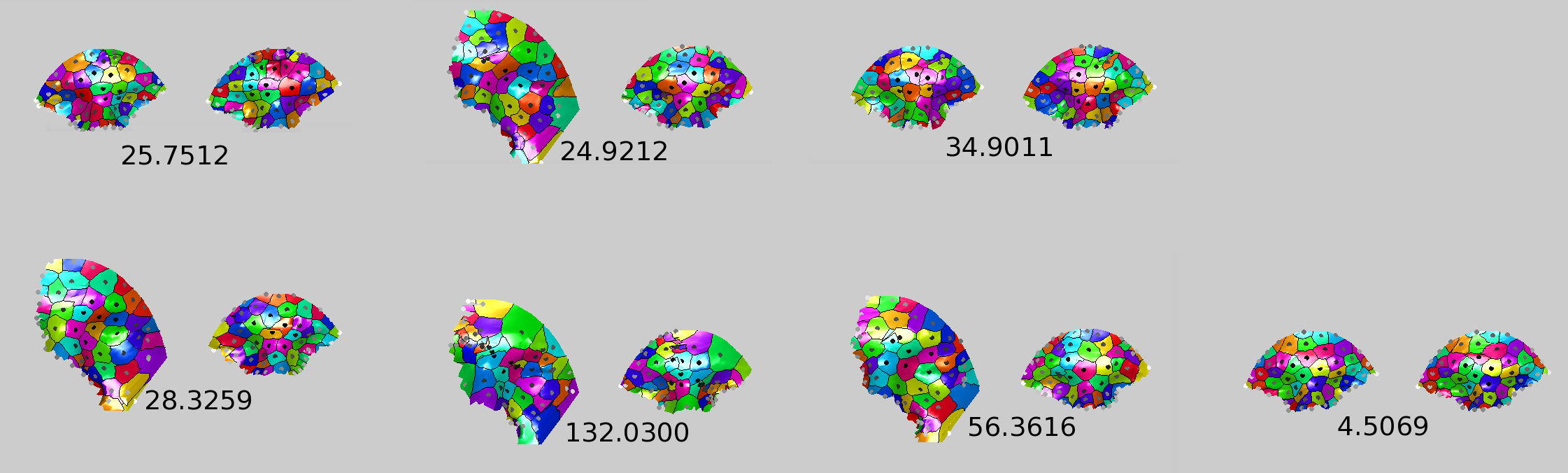
3 points were spread rigidly around the image to mark the centres
of points which define geodetically-bounded surfaces. One of these
is the tip of the nose. In order to prevent the mouth, for example,
from entering the surface (it depends on the length of the nose and
its vertical component prevents sufficient point sampling due to the
camera's angle), there is a Euclidean concern around there, which
explains the flat boundary at the bottom (Figure ).
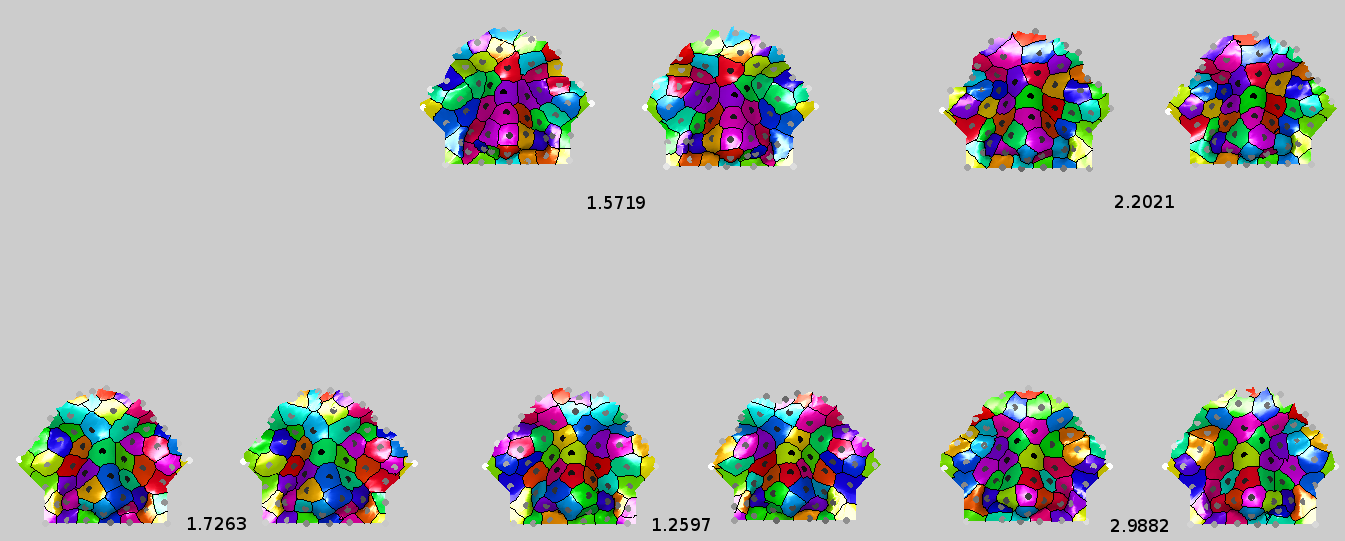
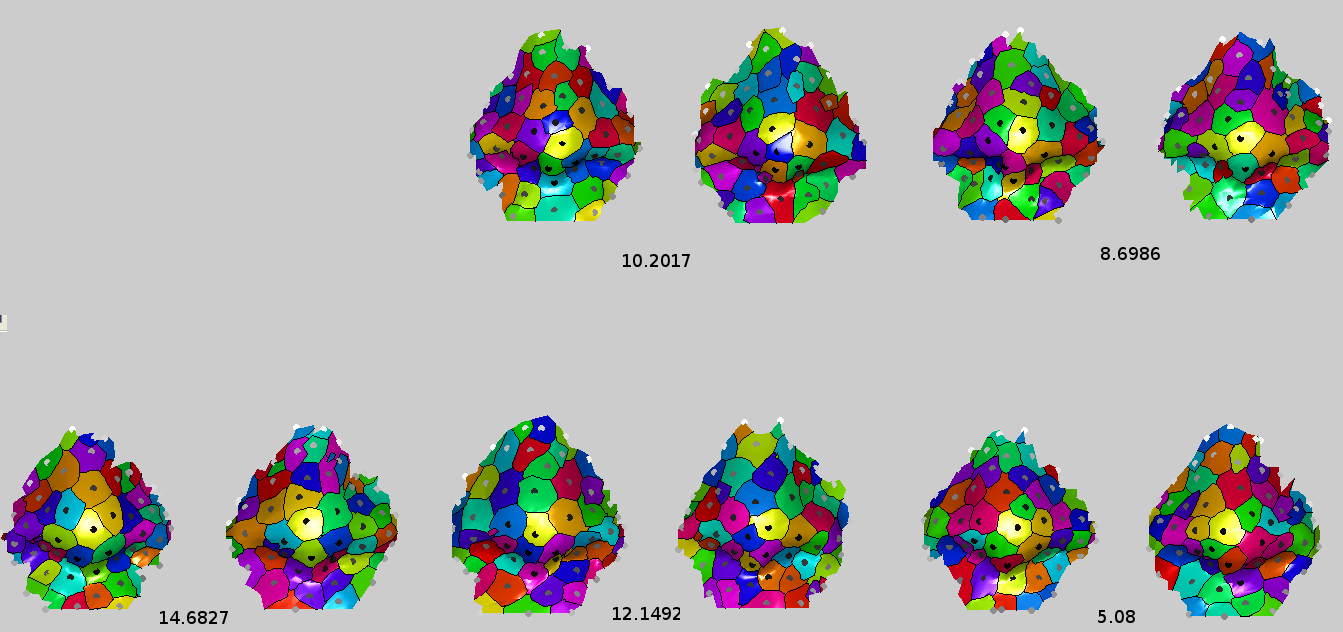
The results can be properly explored once a tolerance component is
added to the probe or the gallery (consistently for score stability)
and another quick set of evaluations was run on a set where the carving
was based on the forehead and nose rather than the eyes. (Figure )
There is probably too little information of high entropy around the
forehead, though. Sometimes there is hair there.
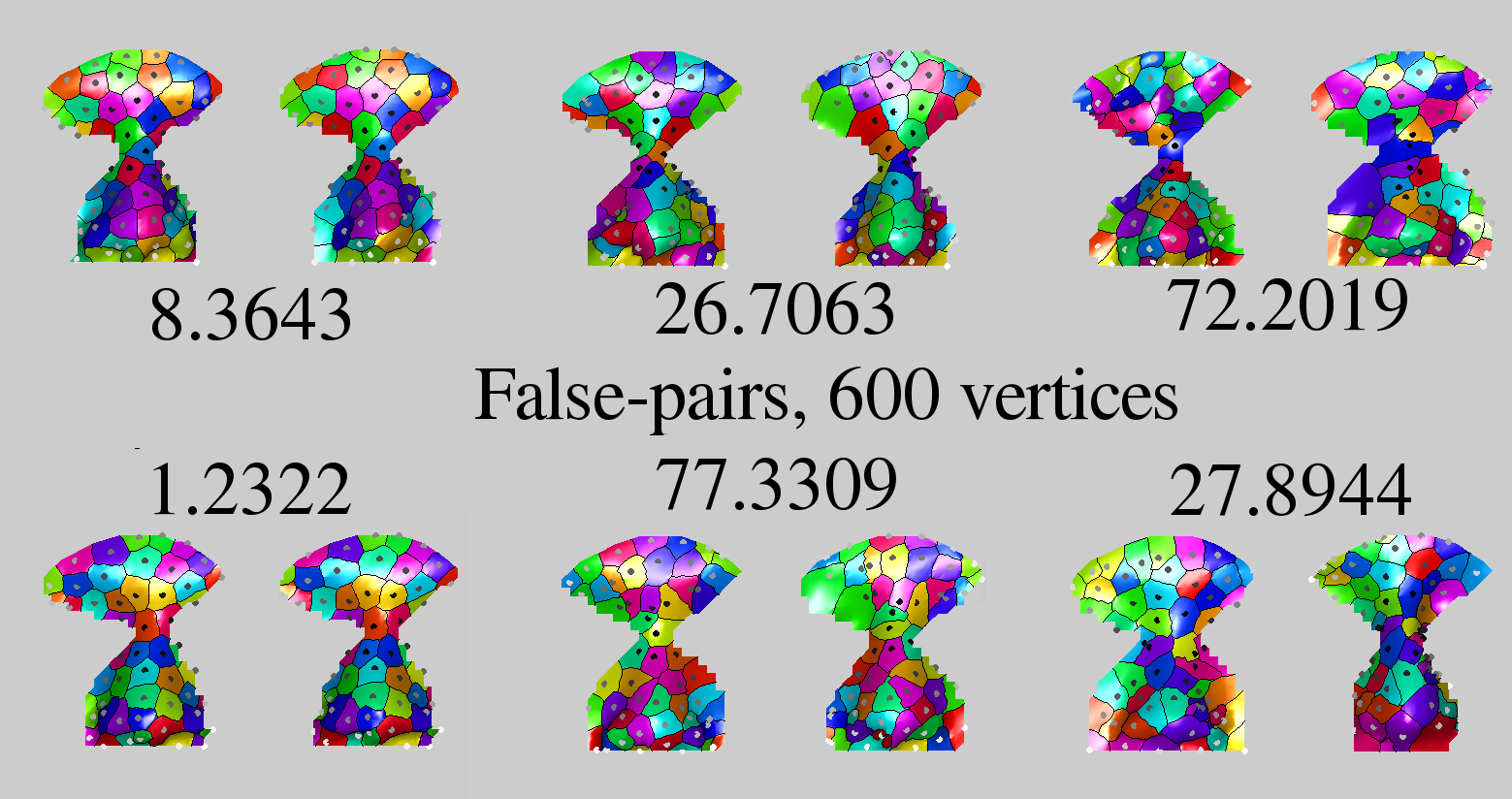
|
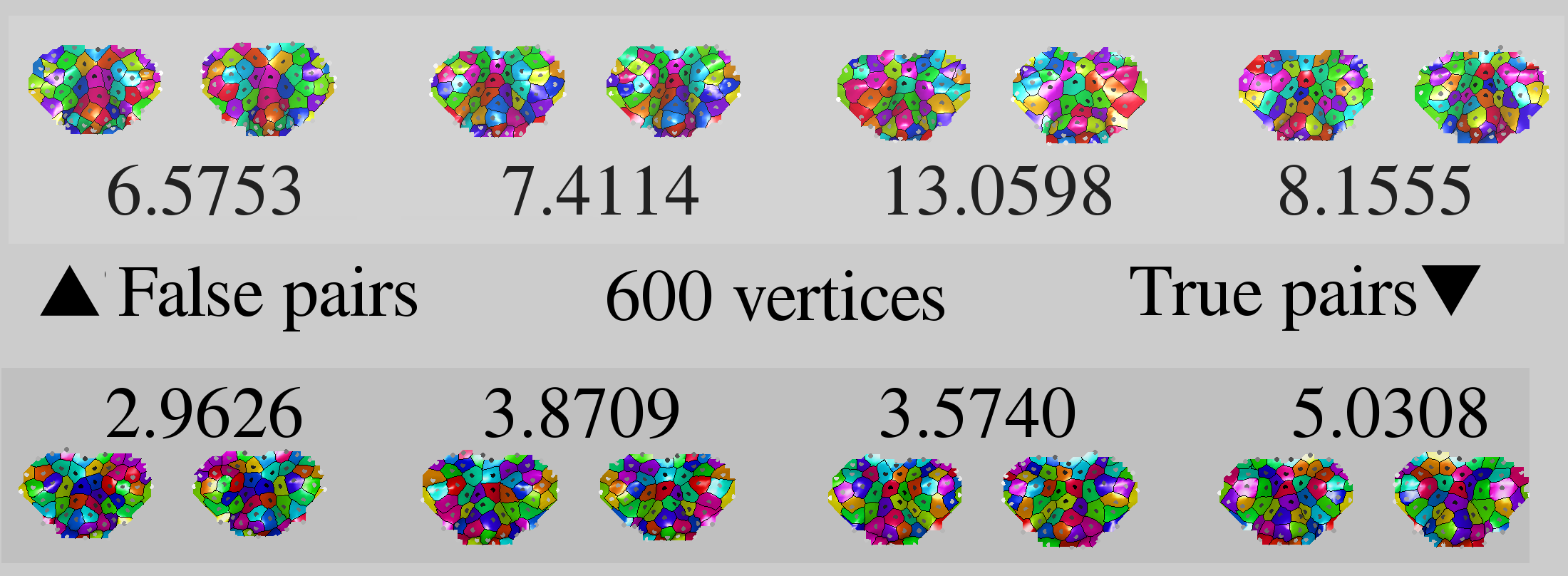
In terms of performance, with just 600 vertices it does a lot worse than the Euclidean approach with a lot more vertices.
|
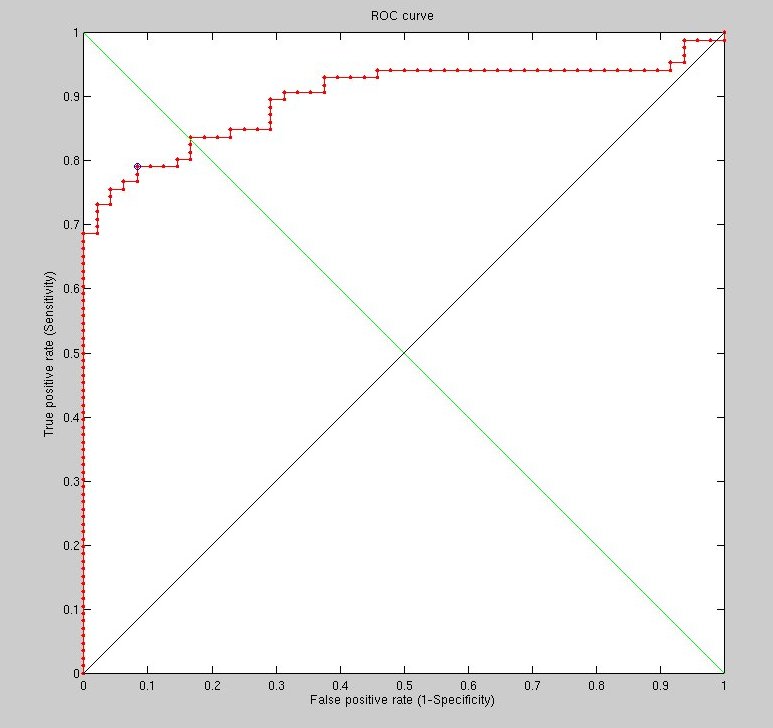
As we rerun with high density, the results change. Increasing the
number of vertices to 2420 improves the results considerably. Some
results are shown in Figure u and Figure
show some early results.
It is hard to make the case for surface sizes that are not as equal as possible, based on the signal (similarity which is still too noisy). At a coarse and fine levels too, the similarity is not great when geodesic measures are used to carve the surface. By going much higher in terms of resolution we can approach or exceed 95% recognition rate, but to reach 99% or thereabouts there will be further exploration of what needs tweaking, based on pairs where misclassification occurs.
To define much higher resolution, there
are several things here and they are all program parameters. First
we have raw image signal. Then there is the sampling of the image
and also the size of triangles we turn the image into, inversely proportional
to their number. The triangulation goes through remeshing and then
fed into GMDS, which also can find ![]() correspondences, yielding
a matrix smaller than the FMM results. All of these parameters affect
speed and some affect stability too. The latest results use 2420 vertices,
but the next experiments will look a little at how this can be improved.
For instance, changing the geodesic thresholds helps refine the area
of consideration. It's unclear how exactly.
correspondences, yielding
a matrix smaller than the FMM results. All of these parameters affect
speed and some affect stability too. The latest results use 2420 vertices,
but the next experiments will look a little at how this can be improved.
For instance, changing the geodesic thresholds helps refine the area
of consideration. It's unclear how exactly.
The sampling density is still not so high as it ought to be as this
leads to some freezes and other issues (if this is attempted, there
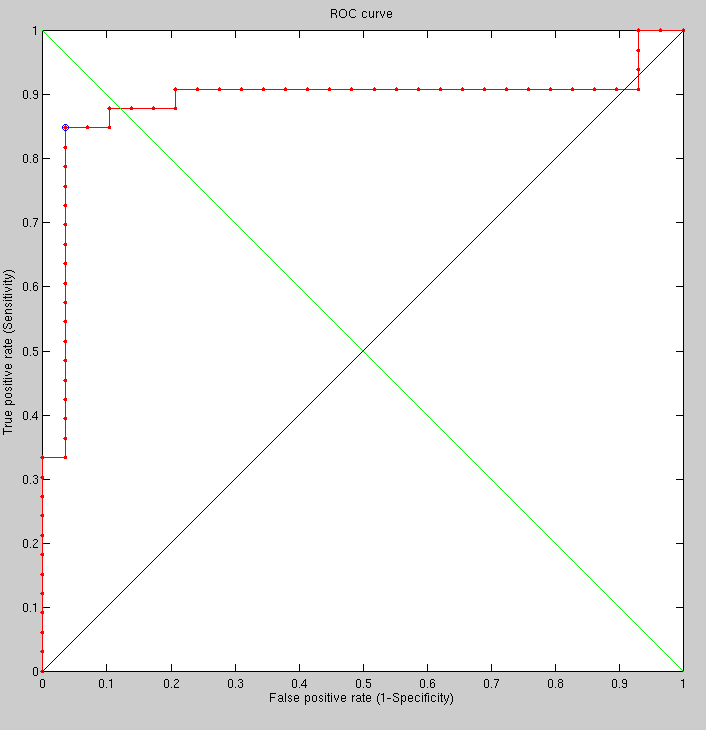
are also RAM constraints). However, two additional experiments were
run to study the effects of changing the geodesic distances around
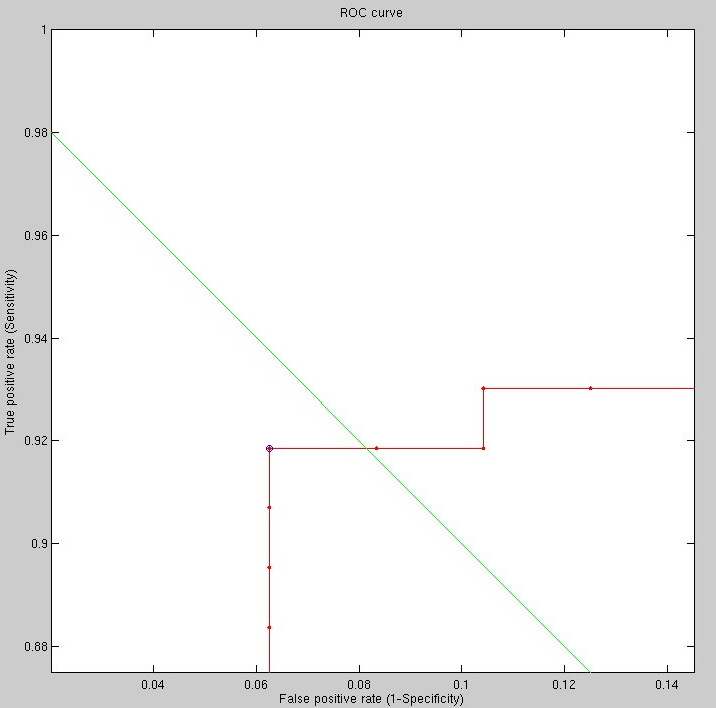
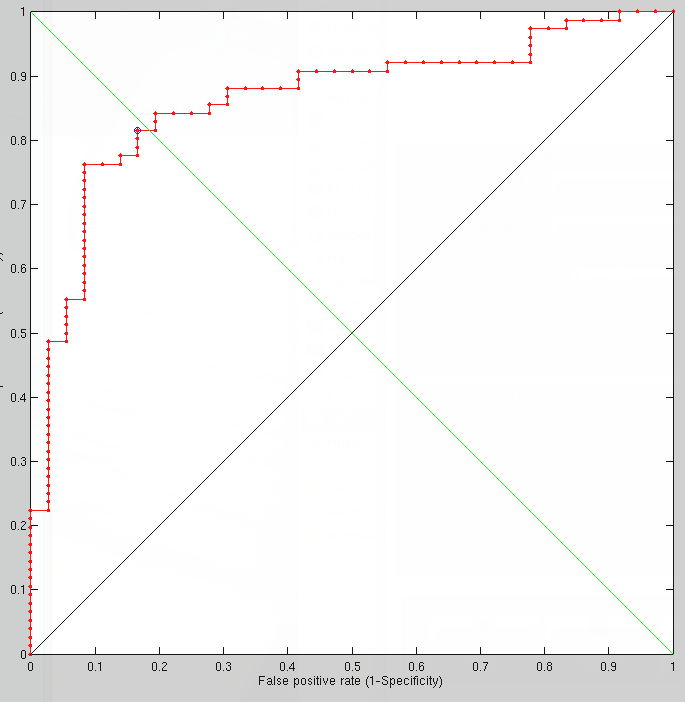
the eyes and nose (see Figure ). When pushed
too far outwards, performance dropped to under 90% recognition rare
(Figure ). It is easy to get a 'feel' for
what works better and what works poorly based on about 100 test pairs,
assessing the results on a comparative basis. Ideally, however, if
stability issues can be improved, then the overnight experiments can
be run reliably rather than just halt some time over the course of
the night.
At the moment, surfaces are being sampled by taking only a separation of 5 pixels between points. In the past that was 2 pixel (range image) and to overcome this loss of signal one can take a local average, which we have not done yet in the experiments. It would make sense to try this.
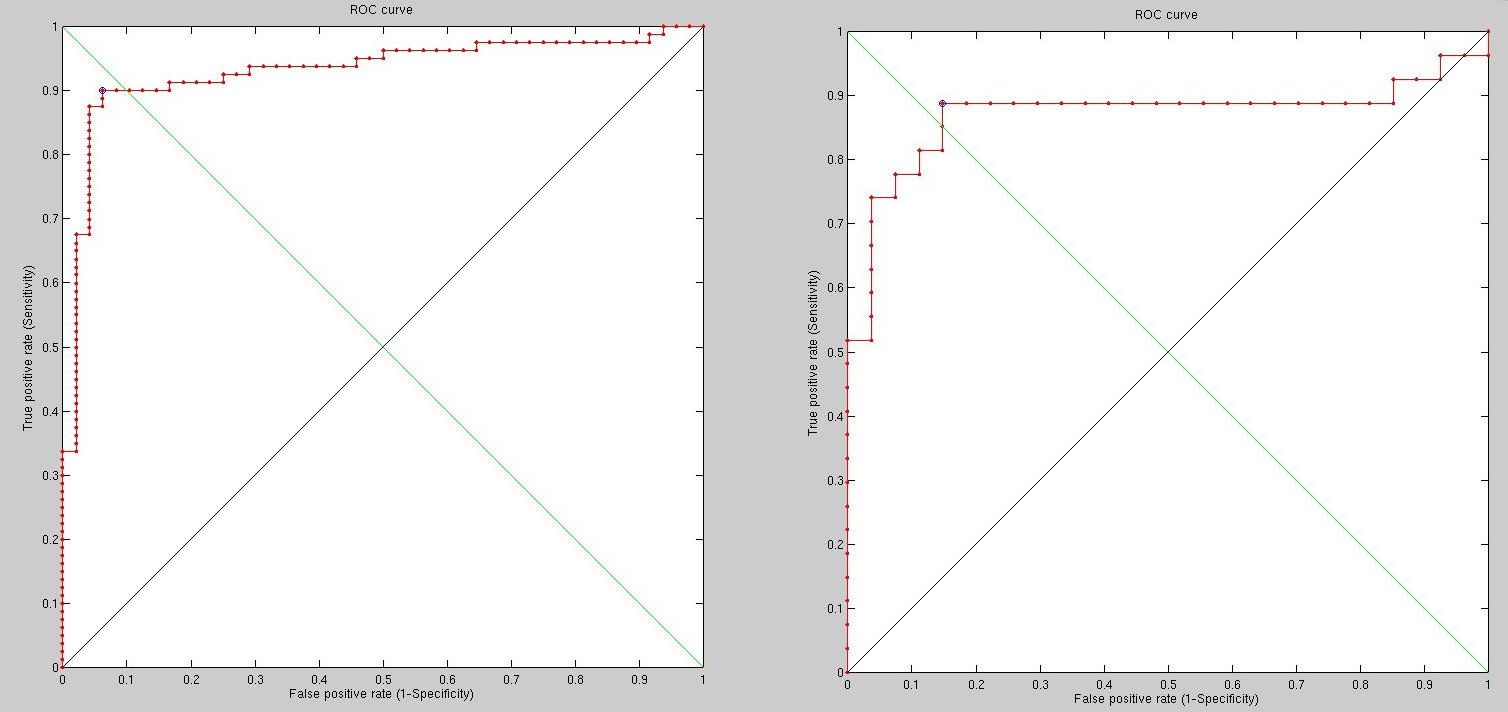
Oddly enough, experiments which test the averaging of range images
(for the sake of better sampling before triangulation) actually indicate
that the averaging reduces recognition rates (Figure .
This performance difference has a direct correlation because all the
other conditions remained identical. This seems to concur with previous
such experiments - those with PCA. How quaint.
Before scaling everything using PCA (to improve the results) it is probably important to ensure that GMDS is performing as well as possible. Right now there is no spatial scaling applied to the score, notably based on the variability of one area compared to another (e.g. rigidness around the nose, unlike the centre of the eye).
|
To re-define the averaging process we apply, what we mean by averaging range images is basically down-sampling the images, or at least the logical equivalent of that.
When the range image is turned into a mesh of triangles there needs to be a discrete sampling of points and the way this is done at the moment involves taking the points within the geodesic mask, then either sub-sampling those (picking with gaps) or talking all of them - about 50,000-60,000 vertices - then remeshing to make things more scalable. The vertices used vary in terms of their number, usually between 600 to 3000 depending on the experiment. It's O(N^2) for FMM, so there need to be reasonable limits. GMDS is sensitive and prone to crashes when the points are picked very densely.
The grid on which you we the ![]() operation has nothing to do with
the number of points, i.e. we work with the original resolution of
the mesh and pick a small number preferably with farthest point sampling
points to embed.
operation has nothing to do with
the number of points, i.e. we work with the original resolution of
the mesh and pick a small number preferably with farthest point sampling
points to embed.
To clarify, there are two phases where FMM is involved. One is the selection of the surfaces on which to perform a comparison. This requires a Fast Marching operation which then helps define what makes the cut and what doesn't. Following that phase we are left with fewer sample points (or fewer triangles) to actually run GMDS on. It is then that GMDS in general (encompassing FMM) depends on the amount of data available to it. What's unclear is, what number of triangles are desirable on each surface? Would 1,000 suffice? Or perhaps more that are smaller? The transition from pixels to triangles is key to preserving all the signal. Triangles are a coarser description of the original data.
We keep the original number of triangles for the whole process. But we can have GMDS work on 5 points distributed (preferably with FPS) on a triangulated surface with 1000000 triangles. It's true that in the preparation step, in principle, one may need to compute the all to all geodesic distances within the surface. But this is wrong to do and could be done on the fly. That is, if indeed we have 5 points trying to re-locate themselves on a 1M triangles surface, then at each iteration we need to compute only 3*5-15 inter-geodesic distances. If we sub-sample the surface, we usually introduce a non-geometric process that could destroy the similarity.
The high vertex/faces density we require is due to very fine features that are identified and paired/matched when GMDS is used as a similarity measure. For a region of about 300x300=~100,000 pixels to limit ourselves to just 1,000-9,000 vertices might not be good enough. Recognition rates are not satisfactory in comparison with state-of-the-art method that take account of denser, finer images with higher entropy. If we compete using an essentially down-sampled image (due to scalability inherent in GMDS), then we throw away a lot of information that can distinguish between anatomically-identical surfaces (be these derived from volumetric data/voxels, camera, or whatever). The bottom line is, after just over a month working with GMDS (since end of July) we are unable to get around this caveat of scale. Many workarounds can perhaps be tested, but none will actually permit the application of GMDS to high-resolution range images, which are what leading algorithms utilise for greater accuracy.
Roy Schestowitz 2012-01-08