PDF version of this entire document
PDF version of this entire document
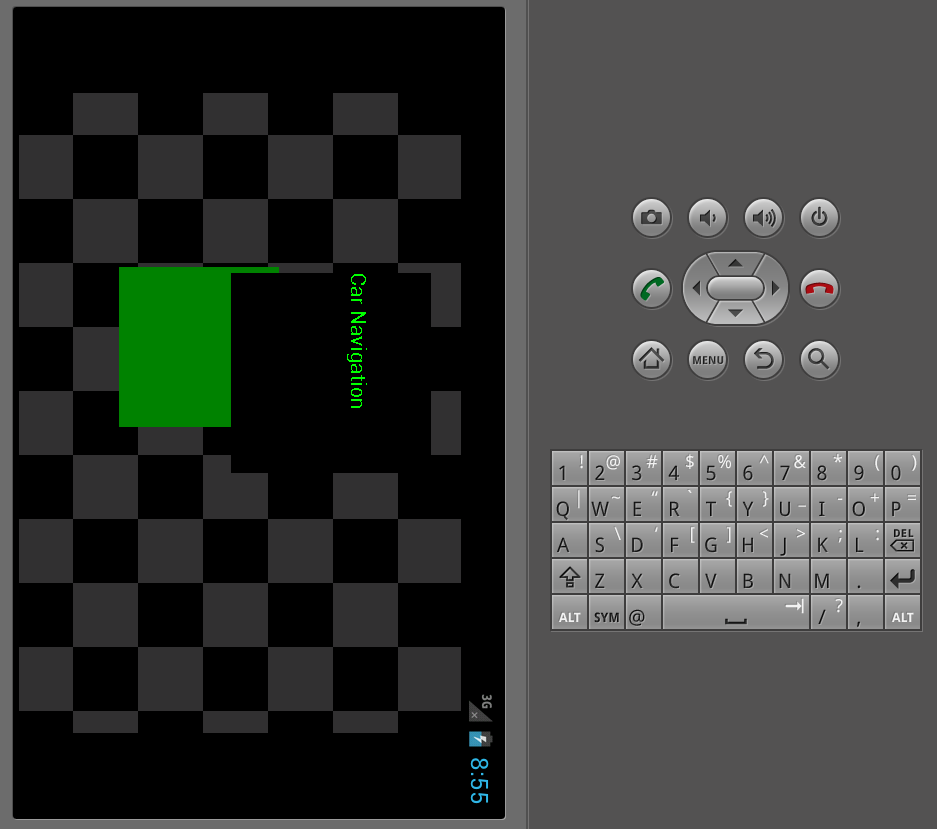
As a baseline example and starting point, Figure ![[*]](/IMG/latex/crossref.png) shows a prototype of a program that captures about 5 frames per second
from an Android-enabled camera.
shows a prototype of a program that captures about 5 frames per second
from an Android-enabled camera.
|
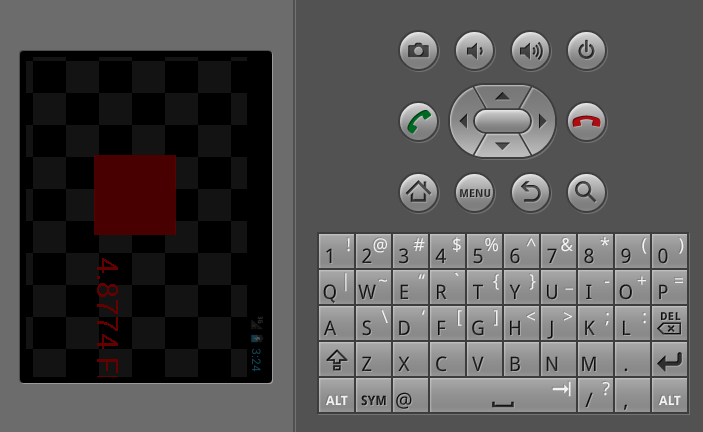
The interface is quite different for a high-resolution smartphone
or a tablet, as shown in emulation mode in figures
and .
Figure shows the image obtained by applying
Canny edge detector [5] to the synthetic scene shown before.
|
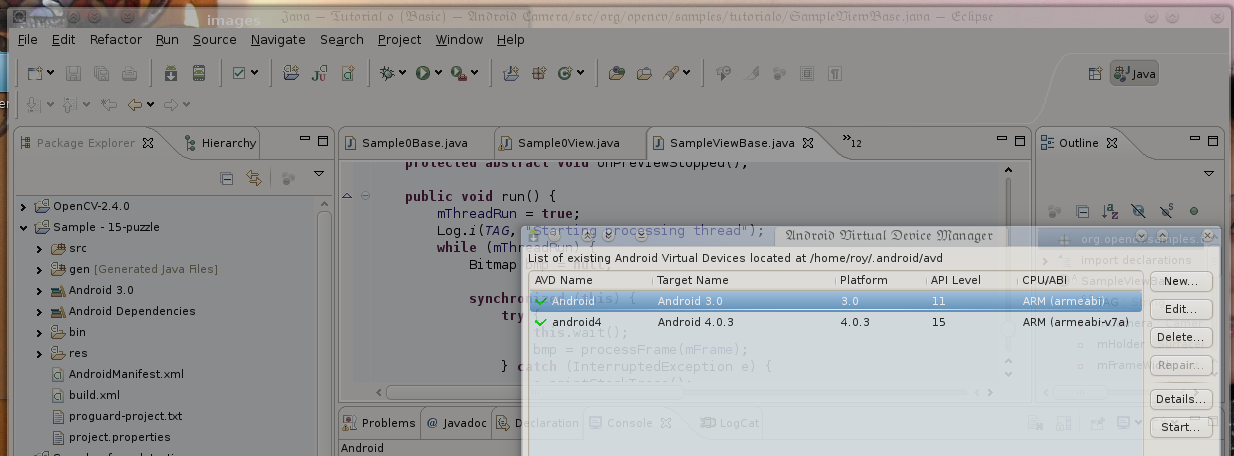
The SDK in use is Eclipse, which is further enhanced with Google addons,
as shown in Figure . The program requires
the Android SDK, NDK, typically Eclipse, and of course OpenCV (I used
version 2.4.x).
|
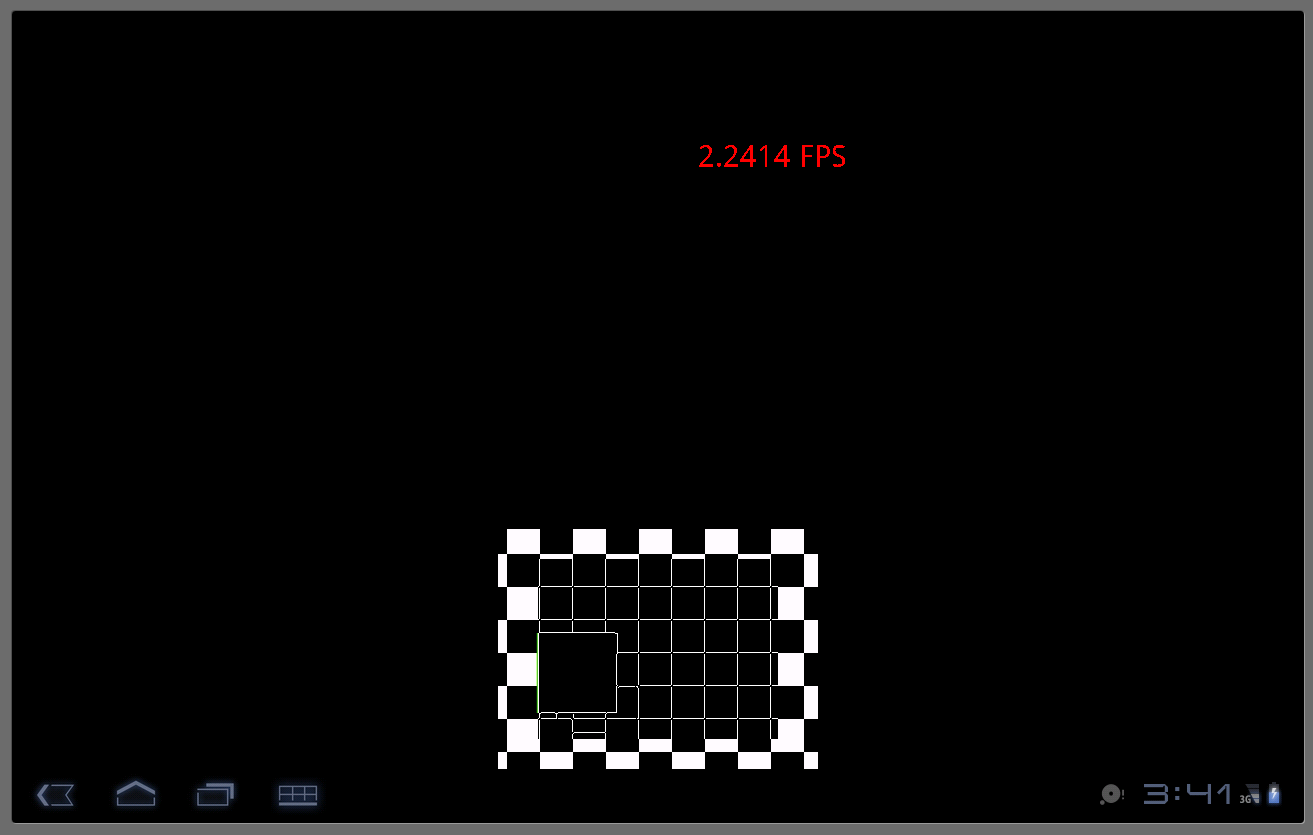
One would have to photograph the tablet to properly show this running
with real data. In emulation I tested several device types, but the
camera is emulated (the example in Figure
is WVGA), unlike when it is run on the device.
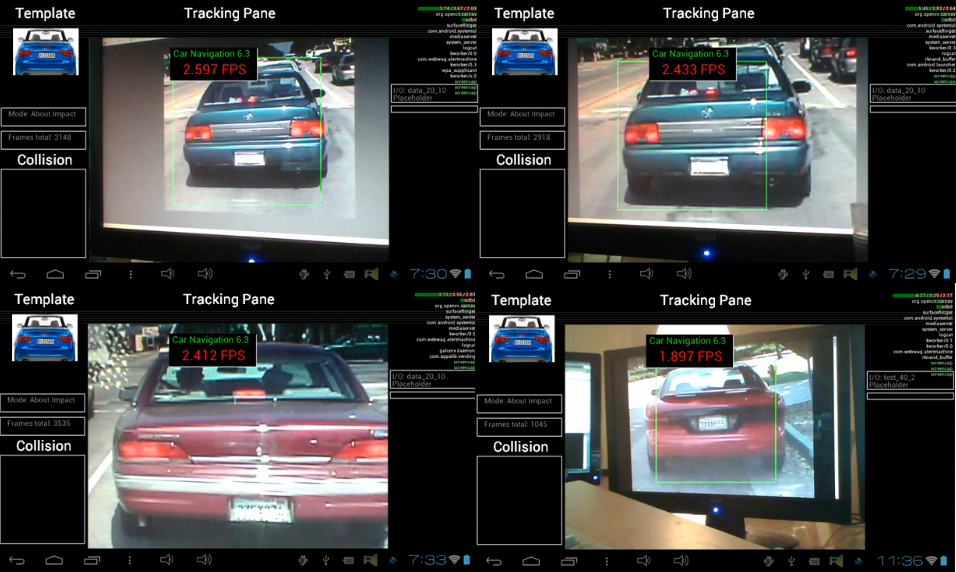
For demonstration purposes I gathered some screenshots of the complete
program running on a real device, a high-resolution tablet in this
case. Figure shows some of those screenshots.
These show the latest version of the program in ``About Impact''
mode - a menu option that enables tracking nearby obstacles. There
are nearly 10 such menu options (the total varies depending on classification
of distinction), but some are simpler filters.
|
Roy Schestowitz 2012-07-02